
Переделка хвоста 450-ки под бк мотор!

Появилась идея, поставить отдельный бесколлекторный мотор на хвостовой ротор моего радиоуправляемого вертолета 450-го класса, для того, чтобы разгрузить мотор на основном роторе.
Поскольку в интернете очень мало информации по такому апгрейду, решил заняться сам этим вопросом вплотную и поставить такой апгрейд на мой RC вертолет 450V2 6S! С тем самым, чтоб убрать передаточные шестерни и ремень на привод хвоста. Теперь будет прямой привод прямо на хвостовой ротор с сохранением изменения угла атаки лопастей.
Для пробы взял моторчик



- Brand Name:Emax
- Item Name: The First Plastic Brushless Motor
- Recommended Excitation Voltage: < 8.4V
- Threaded column torsion strength: ≦ 5kg f.cm
- Motor Type:PM1306
- Framework: 9N12P
- Weight: 19g
- Thead Direction: red cap (CW) black cap (CCW)
- Thead Direction: red cap (CW) black cap (CCW)
- KV: 2300 RPM/V
- No-load Current (10V): 0.7A
- Stator Size: 18.2 x 6 mm
- Shaft: 3 mm
- Diameter: 24.9 mm
- Length: 28.7 mm
- Stator Size: 18.2 x 6 mm
- Shaft: 3 mm
- Diameter: 24.9 mm
- Length: 28.7 mm
- No.of cells: 2S LiPo Propeller: ≤6*4 propeller
- No.of cells: 3S LiPo Propeller: ≤5*3 (3 Blade propeller)
- Motor mount or multirotor frame arm of over 5mm :usage M2*8mm mounting screws
- Motor mount or multirotor frame arm of over 1mm :usage M2*4mm mounting screws
- Motor mount or multirotor frame arm of over 3mm: usage M2*6mm mounting screws
- Motor mount or multirotor frame arm of over 3mm: usage M2*6mm mounting screws
Придется моторчик перематывать под 560-630 kv. Поскольку эти моторы не рассчитаны под 6 банок и кв у них не подходит. Главное, что в этих моторах вал 3 мм. Поэтому смело можно попробовать поставить туда удлиненный вал с какого нибудь CD или DVD рома. Как раз в них используются валы для движения головки и диаметр этого вала 3 мм. Что мне и нужно, для того, чтобы поставить хвостовой ротор на прямую на этот вал.
К мотору буду использоваться регулятор

Очень интересный регулятор! Сразу идет с прошивкой BLHeli, которая очень неплохо показала себя на микровертолетах. Много настроек, есть гувернер, функция маячек и тд и тп.

Для того чтоб удобства настроек, приобрел к нему программатор

USB Программатор использует версию BlHeli 14.0.0.3 которую можно скачать тут.
Наконец-то приехали долгожданные мотор, и регулятор.


Мотор

Даже есть крепежные винтики.



В комплекте к моторчику имеется инструкция

И регулятор



Тоже имеется мануал к регулятору.
Теперь осталось, дождаться программатор для регулятора. И можно приступать к доработке.
Ну вот. Дождался программатор!


Мотор пока решил не перематывать, а попробовать его использовать на 2300кV на 2S или 3S.
Приступаем теперь потихоньку дальше.
Закрепил моторчик. Пришлось протачивать вал, чтоб поставить, стопор. Как и было на валу. Жаль не сфоткал. Как буду разбирать мотор для перемотки, сделаю фото. Вал у меня чуть длиннее (на данный момент), позже обрежу. Длина должна быть 65 мм (общая). С одной щечки подшипник убрал (ненужен он там) в моторе подшипник уже есть на этом узле. Ниже фото данного узла в сборе.


Винты с хаба, которые держали щечку, пошли на крепеж мотора.

А на их место ставим винты с плоской шляпкой.

Чтоб не упираться в мотор.





Подключил все для теста.

Подключилось все сразу и без каких нибудь танцев с бубном. Работает отлично!
Подключить к программе, тоже не составило ни какого труда, выбрал интерфейс ATMEL SK Bootloader (ArduinoUSBLinker) в закладке выбора интерфейса Select ATMEL/SILABS Interface.

Выбрал порт COM5 (у меня) и нажал Connect.
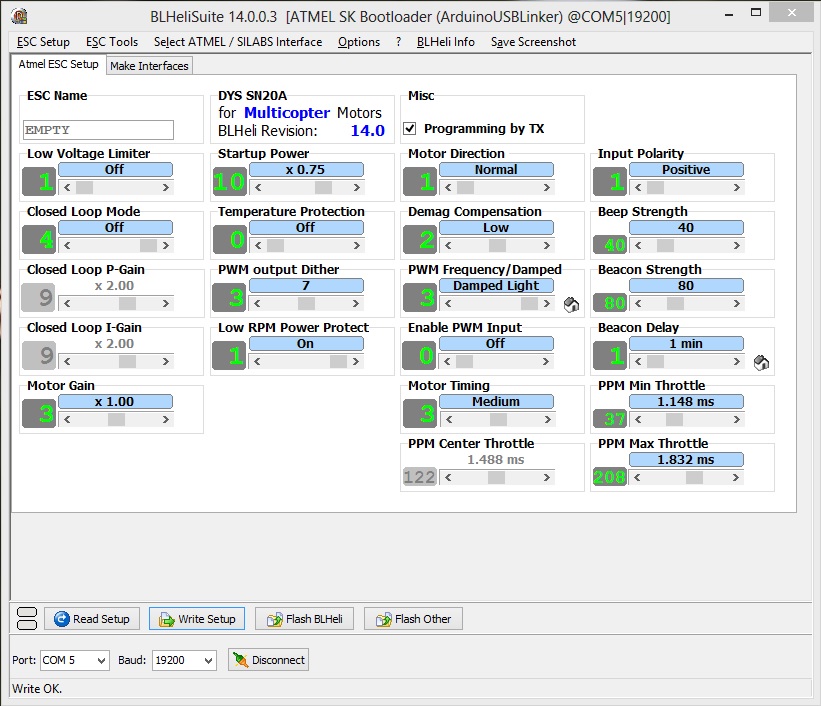
Попал в настройки регулятора. Прошивка предустановлена для мультироторных систем. Будем прошивать под себя и думать как все это настраивать и подключать )))
Но столкнулся я с проблемой, прошить под себя регулятор, оказывается сходу не получится, так как, загрузчик у программатора USB Linker больше стандартного по объему, и из-за этого, не хватает памяти под нужную нам прошивку. Через USB Linker можно прошить прошивку только, либо под хвост с фиксированным шагом, либо, под мультиротор, а они нам не подходят, так как, в них нет функции говернера, которая нам и нужна, для поддержки постоянных оборотов при работе с кривой газа, которая у нас, как раз должна быть ровная, как полка. :) Поэтому прошить регулятор через этот USB Linker не получится.

Отдельное спасибо моему другу Вячеславу Поповичу, за помощь в установке разъема на регулятор, для прошивки USBASP программатором. Теперь можно прошивать регулятор любой BLHeli прошивкой, обновлять прошивки, настраивать по своему усмотрению и тд и тп, что я собственно и сделал.
Установил хвостик на вертолет.



Снял лишнюю механику )))

Так как, мотор рассчитан на батарею 2-3S, решил вначале попробовать запустить его от 2S. Ведь, ставить на вертолет еще одну батарею, не вижу смысла. Поэтому поставил степдаун по типу такого на 5А и настроил его на 8,4 вольта.


Закрепил регулятор для хвостового мотора. И подключил его к тому же каналу, что и основной регулятор через разветвитель.




Разъем XT-60 на регуляторе, пока оставил. Для тестов и настроек. Далее его сниму, и припаяю все напрямую.

Провел проводку от хвостового мотора к регулятору.

Общий вид

Проверил работу системы в целом, без лопастей ОР (основного ротора). Вроде неплохо. Хвост при попытки изменения направления пытается вернуться в исходное положение. Т.е работает! Показалось вроде маловато оборотов хвоста, но не стал на проверочном этапе добавлять.
Поставил лопасти ОР и провел тестовый запуск. Не зря мне показалось, что оборотов маловато, хотя может и отсечка сработала, что мне кажется, более вероятно, но в итоге, получил волчка, т.е. хвост закрутило против часовой стрелки в неконтролируемый пируэт. Щелкнув холд, мы упали, но очень удачно. Немного счесал краску на концах лопастей и в минусе одна качалка на сервоприводе.
Поменял качалку, проверил всю механику, добавил напряжение на степдауне до 12,4 вольт. Подумал так, если произошла отсечка по току, то при поднятии напряжения, ток уже будет меньше. И отсечки не должно быть. И пошел опять проверять.
Ну и в итоге, эта таки "шайтан машин" полетела! Конечно нужно еще все настраивать, но первый тестовый полет, очень порадовал. Летает! Очень необычный звук хвоста! Пока проверить силовые фигуры не удалось. Но как будет возможность, проверю, запишу видео, естественно выложу здесь и вынесу свое резюме по данной переделке/доработке. ;)
Кстати, еще одно, доработал слайдер хвоста, очень теперь нравиться его работа. Работает от веса хвостовой тяги. Т.е. усилие на серву минимальное!
Новость от 11.2.16 г.
Силовые фигуры не тянет. Моторка слабовата. На днях разобрал мотор.


Самое трудное было снять статор. Но победил, благодаря полукольцам.
Вставил их между статором и верхней частью мотора, и аккуратно выдавил винтами. Обмотка конечно повредилась, но она нам уже не нужна.

Намотка была звездой, по 11-12 витков (Эх.. Китайцы! :) ).




Видно что звезда, концы трех обмоток вместе.

Обмотки намотаны в три жилы

Смотал первую обмотку.


Вторую.

И третью.

Получил голый статор.

Начал мотать по той же схеме, т.е. схема намотки звездой или DLRK.

Поскольку мотор был 3S, а мне надо на 6S, намотал для начала в два раза больше витков, одной жилой. 22 витка. Для пробы.
Намотал.

Соединил концы обмоток вместе.

А теперь в термоусадочку

И поставил статор на место



Поставил на место подшипники


Ну и установил на вертолет

Теперь как будет возможность, проведу ряд тестов. KV мотора получилось в районе 1060. Многовато. Но посмотрю, как будет под нагрузкой. Но думаю, что надо еще витков 8 намотать, чтоб было не 22, 30. И кв будет меньше. Потому как сейчас на моторе 23500 оборотов.
Новость от 15.2.16 г.
Провел тест дома. После пару минут работы, от мотора появился характерный запашок ))). Видать сечение провода маловато. Думал перемотать в две жилы. Не влазит даже по 30 витков. Намотал в одну жилу, по 32 витка. Провел опять дома тест, нормуль, еле тепленький. По тяге субъективно стало лучше, надо проверить в полете, тогда будет сразу ясно. Пока погода не дает. Как появится возможность, протестирую.
Протестировал, слабый и греется сильно. Не годится.
Новость от 24.10.16 г.
И так, наконец-то довел до ума своего "киборга" )))

Значит так, моторы которые пробовал выше, слабые. Надоело мне все это, не выдавишь с них нормальной мощи. Поэтому, поставил я моторчик по мощнее! Народ любит такие на квадрики ставить. :)

Но, он максимум рассчитан под 4S и дабы сразу не спалить стоковый вариант, я его перемотал под 6 банок (6S).
Скажу сразу, kv получилось значительно ниже. (Все время забываю точно померить). В идеале, я думаю, кв мотора должно быть в районе 600. У меня получилось где-то в районе 1000. Позже перемотаю на 600. Чтоб уже вообще все по фэншую было )))
Установил все это на подопытного. :)

По-моему, все вышло, довольно неплохо! :D
Пока для теста поставил на хвост ESC YEP 40A. С ним хвостик, прям поет на одной ноте! Позже поставлю DYS 30А с BlHeli. Посмотрю, как будет он себя вести на хвосте, ну и за одно, сравню его с YEPом. Интересно, как будет на нем работать гувернер от BlHeli.
А теперь немножко фото.


Провода от регуля, конечно позже переложу по лучше.


Просто, не терпелось попробовать )))

Ну и наконец, небольшой пробный/тестовый полет!
Новость от 3.11.16 г.
Не хватает хвоста? Маленькие обороты? Хочется управлять оборотами на хвосте?
Тогда мы идем к вам! )))
Так вот, к чему это я? А!! Вот к чему, наконец-то сделал, как и задумывал. Огромное спасибо за консультацию Александру Чернышу (Одесса). С его помощью, получилось реализовать задуманное!
Теперь расскажу, немного подробнее.
Подключение хвостового регулятора, было в параллель с основным. Поэтому выставлять обороты/полку для хвостового регулятора отдельно, для управления регуляторами раздельно, не было возможности. То есть, подключение хвостового регулятора, было через "смеситель" и взято с того же канала, что и подключение основного регулятора.
Вкратце, у установленной на мой вертолет фбл системы (Brain 2), 8-ой канал это "спасалка", 7-ой это управление банками.
Для того чтобы, реализовать раздельное управление регуляторами, мы в фбл переносим на один из банков (имеется 3 банка, управление банками 7-ой канал) "спасалку", с 8-го канала, тем самым, у нас освобождается один канал (на фбл это разъем Ch2). Что было и сделано. Далее благодаря используемой мною аппаратуры управления Walkera Devo 10, назначаем переключение банков на тумблер, т.е. привязываем к тумблеру, функцию "спасалки", у меня это тумблер Gear, ну а управление хвостовым мотором я пока назначил на крутилку, после, переведу управление на трехпозиционный переключатель MIX.
Итак, на тумблере у нас есть три положения. Думаю сделать так:
1. Положение (Mix0) - хвостовой мотор выключен.
2. Положение (Mix1) - полка газа для 3D полетов, или спокойных полетов, тут обороты сильно не нужны.
3. Положение (Mix2) - полка газа для Hard 3D полетов, тут наваливаем по полной программе! )))
Как это работает, можете увидеть ниже, на видео. ;)
Тестовый полет сделаю, как будет погода. Как назло то дождь, то снег :(
P.S. Если есть вопросы, задавайте, всегда рад ответить. :)
Так же, любые интересные идеи и предложения, приветствуются! ;)
Продолжение следует...
Интересный проект! Ждем продолжене!
ОтветитьУдалитьМотор и регуль уже в Киеве. А вот программатор, ну ни как не вышлю блин... А заказывал, примерно в одно время. Завтра опять буду с ними отношения выяснять.
ОтветитьУдалитьНу никак не вышлют. Сегодня написали мне, что посылка потерялась. Ну опупеть!
ОтветитьУдалитьВыслали программатор, жду. Мотор и регуль уже у меня. :)
ОтветитьУдалитьКак успехи в этом проекте?
ОтветитьУдалитьПроект движется. Была заминка с прошивкой регулятора. Ну и конечно, все время не хватает времени
ОтветитьУдалитьУх ты! Интересный проект! Ждем продолжения :)
ОтветитьУдалитьОтлично! Жду окончательного вердикта и попробую повторить!
ОтветитьУдалитьОтличная работа! Буду ждать окончательного вердикта:) , но думаю, что все будет хорошо! Спасибо!
ОтветитьУдалитьАвтор проекта - молодчага! Тоже с нетерпением жду продолжения проекта.
ОтветитьУдалитьСпасибо! Сам хочу ))) ;)
Удалить